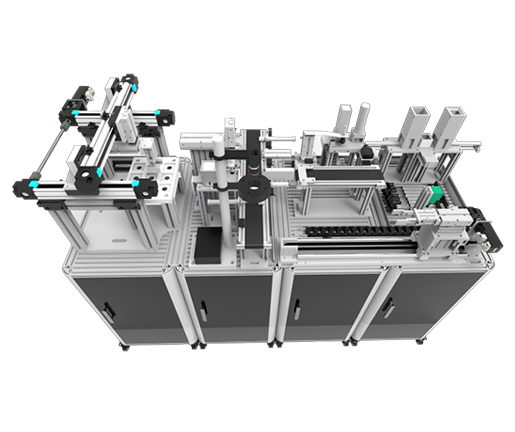
The material storage management system training platform can realize material conveying, manipulator access functions, and simulate warehouse entry and exit functions. The material storage management system is a new type of modern warehouse that uses rail-guided stackers and various peripheral equipment to achieve automatic storage and cargo management. It adopts intelligent control and management technologies to maximize the automation functions, and can provide enterprises with complete logistics automation solutions ranging from storage, automated conveying, automated production to finished product conveying.
It includes a controller, upper computer, servo driver, servo motor, DC power supply, frequency converter, code reader, etc. The specific requirements shall not be lower than the following configurations: the controller has a 125 KB working memory; a 24 VDC power supply, on-board DI 14×24 VDC sink/source type, and on-board DQ 10×24 VDC; the upper computer is equipped with a 10.4-inch TFT display with 640×480 pixels and 256 colors, and supports key and touch operations. The servo driver has a PROFINET RT/IRT interface with 2 ports (RJ45 sockets). The servo motor has a rated torque of 0.66 Nm and a maximum current of 4.2 A. The DC power supply has a rated input voltage of AC 120/230 V, a rated output voltage of DC 24 V, a rated output current of 10 A, a power phase of single-phase, an AC input voltage range of AC 85 – 132 V/170 – 264 V, and a rated output power of 240 W. The frequency converter has a rated input current of 4.5 A, a rated output current of 1.7 A, and a power of 0.25 KW. The code reader has a maximum reading speed of 30 codes per second and an RS232 serial output.
It is a three-axis system that can realize motion control in three axial directions, as well as material conveying, sorting, and manipulator grabbing functions, simulating the control of material entry and exit from the three-dimensional warehouse through the actual storage elevated model.
It includes a conveyor belt, a three-dimensional warehouse, and a storage mechanism. The specific requirements shall not be lower than the following configurations: the conveyor belt is made of PV material.
The storage mechanism is equipped with storage position status display and light indication.
The three-dimensional warehouse sorting device is composed of a feeding mechanism, a material conveying mechanism, a manipulator mechanism, a sorting mechanism, and a material entry-exit mechanism for the three-dimensional warehouse. It can select the desired storage position according to the material number and quantity, execute the taking-out action as required, and the system will automatically return after the instruction is completed. If the selected storage position is empty before executing the taking-out instruction, the instruction will not be executed.
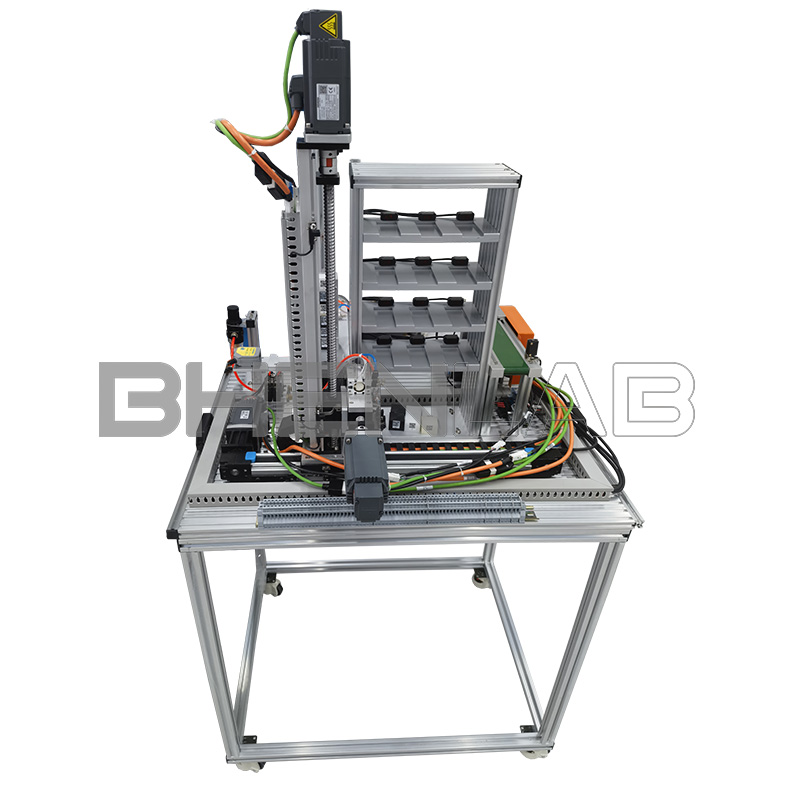
Select the desired delivery storage position and press the material number and quantity. Press the delivery instruction button; if the selected storage position is full, the instruction will not be executed. After the instruction is completed, the system will automatically return. If the storage position is empty before executing the delivery instruction, the instruction will not be executed. It consists of a warehouse rack with no less than 3 rows and 4 columns.
According to the system design, its size is not less than 1500800750 (lengthwidthheight, unit: mm).
When the manipulator platform moves to the designated position of the shelf, the delivery platform extends forward to take out or put in the goods. When the goods are taken out or put in, the fork retracts backward. The entire system requires three-dimensional position control. Its workflow is as follows:
- Power on.
- System self-inspection.
- Set the function switch to the corresponding position.
- Place a model in the designated position. When placing the model, ensure accurate positioning and pay attention to the activation of the bottom detection of the position.
- Execute the taking-out instruction:
→ Select the desired taking-out storage position according to the material number and quantity.
→ Execute the taking-out action as required.
→ After the instruction is completed, the system will automatically return.
→ If the selected storage position is empty before executing the taking-out instruction, the instruction will not be executed.
- Execute the delivery instruction:
→ Select the desired delivery storage position and press the material number and quantity.
→ Press the delivery instruction button; if the selected storage position is full, the instruction will not be executed. After the instruction is completed, the system will automatically return.
→ If the storage position is empty before executing the delivery instruction, the instruction will not be executed.